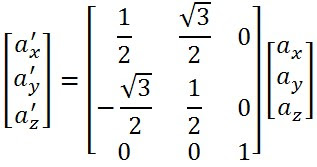
The matrix shown above transforms the components of a vector in one coordinate frame S to the components of the same vector in a second coordinates frame S'. This matrix represents a rotation of the reference frame S by
B. 30o counterclockwise about the z-axis
C. 45o clockwise about the z-axis
D. 60o clockwise about the y-axis
E. 60o counterclockwise about the z-axis
(GR0177 #75)
Solution:Rotation about z-axis has the form:
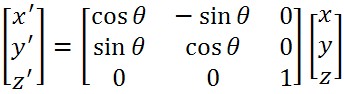
Since
 and
and 
 E is the right answer.
E is the right answer.Answer: E
No comments :
Post a Comment